Release - Emio Labs v25.06
· 3 min read


We are happy to announce Emio Labs v25.06!
With this release Emio Labs is now available for MacOS. The release also contains many new exciting features and improvements. To upgrade, download the new version !
Highlights
✨ Emio Labs on MacOS!
You can now download Emio Labs for MacOS! Download the latest version here and follow the installation steps.
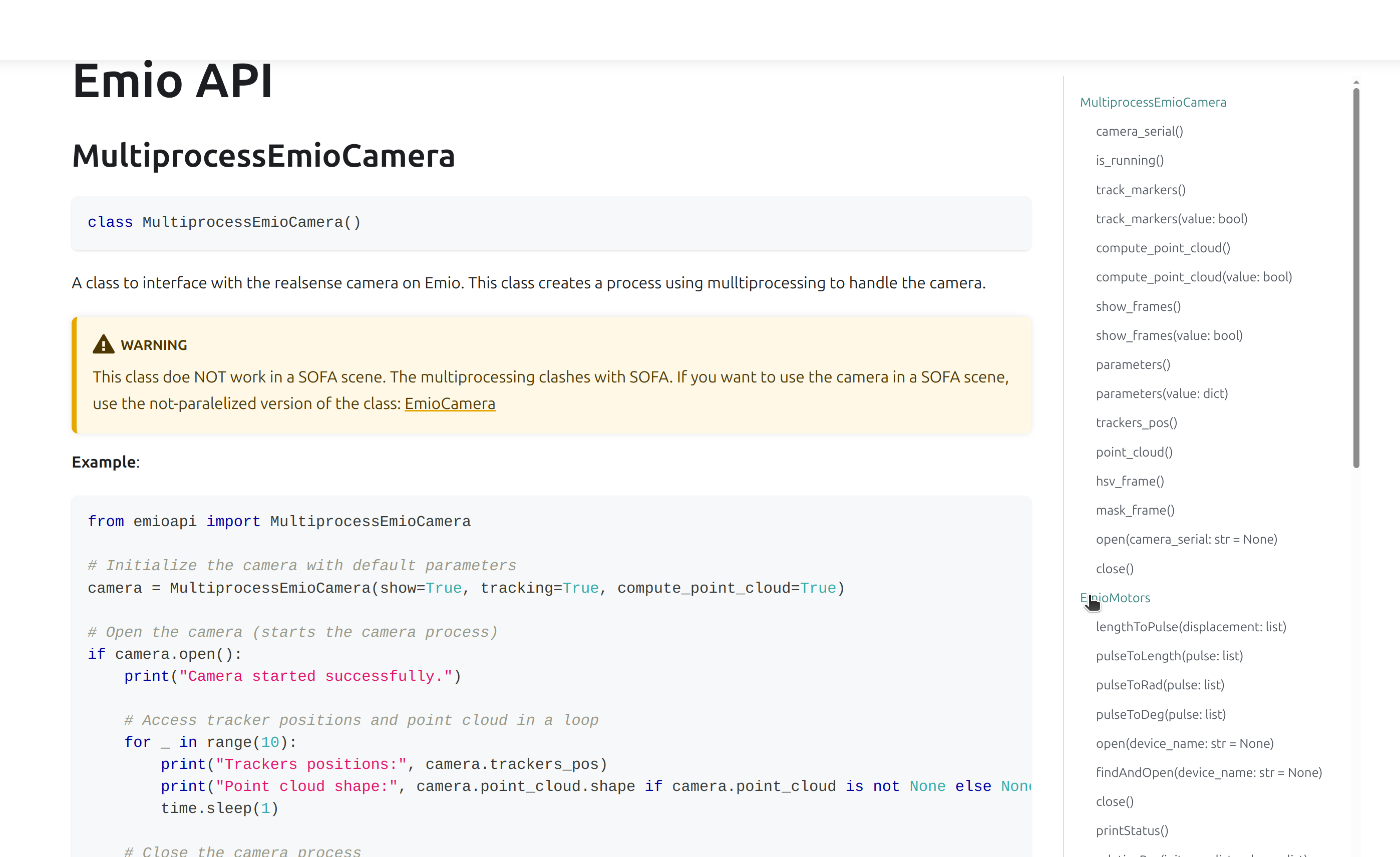
✨ A New Emio API
Emio Labs now comes with a new API to use Emio without the simulation environment. Browse our documentation to learn how to use this API.
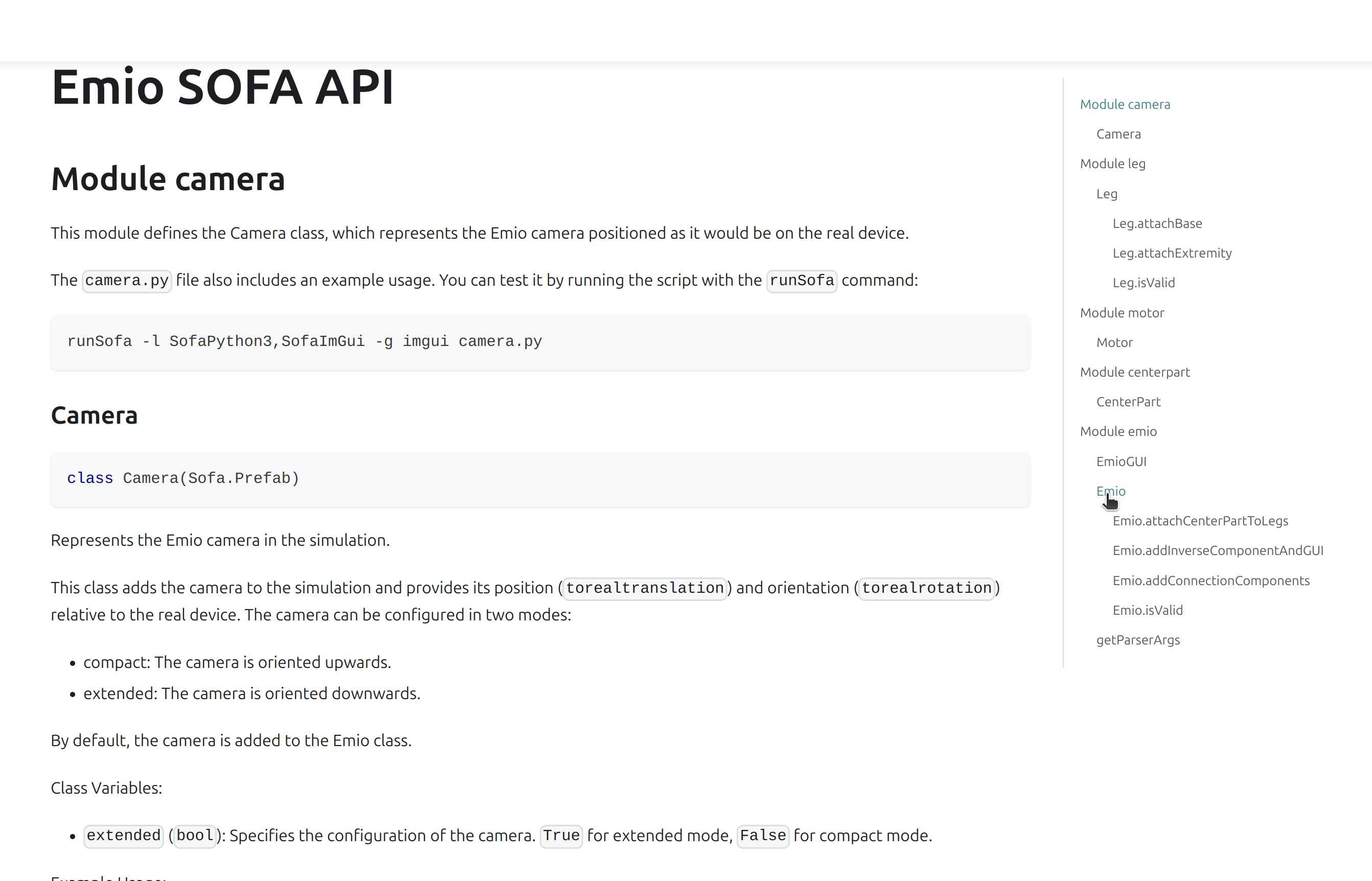
✨ Emio SOFA API Documentation
To help you customize your Emio SOFA scene, we created a new documentation page for that!
Check this page to learn about the Emio SOFA API.
Other Changes
Enhancements
- The labs have been renamed, removing the numbering to let you organize the labs as you want
- Changes in the solutions:
- The leg for the
lab_designdoes not collide with the structure anymore - There were some typos in the solutions of the
lab_colsedloop
- The leg for the
- There were some typos and descriptions missing in the
lab_inversekinematics:- Matrices descriptions in the course material
- Unifies the notation between the python code and course material
- Detailed explanations in the solution
- You will now find tips to 3D print the soft parts of Emio in the
lab_design - Update the instruction for the setup of FreeCAD in the
lab_design - The numbering of the motors was shifted in some labs
New Features
- The camera orientation in the simulation is automatically changed with respect to Emio's configuration: extended or compact
- While we work on implementing automatic camera calibration, we have exposed the transform parameters in the GUI, allowing manual camera calibration for the lab model.
- In the sandbox, you can now set up Emio with a custom number of legs
- You can use the option
show_video_feedin theDotTrackerto see the camera feed while running the simulation
Bug Fixes
- Parameters fix:
- The mass of the cube in the
lab_modelswas off by a factor of 10 - The Young's modulus has been changed consequently
- The artificial rigidity of the FEM volume model is compensated with the
tetraYMFactorset in theparameters.pyfile
- The mass of the cube in the
- On Windows, we fixed the issue with paths containing spaces