Find a Lab
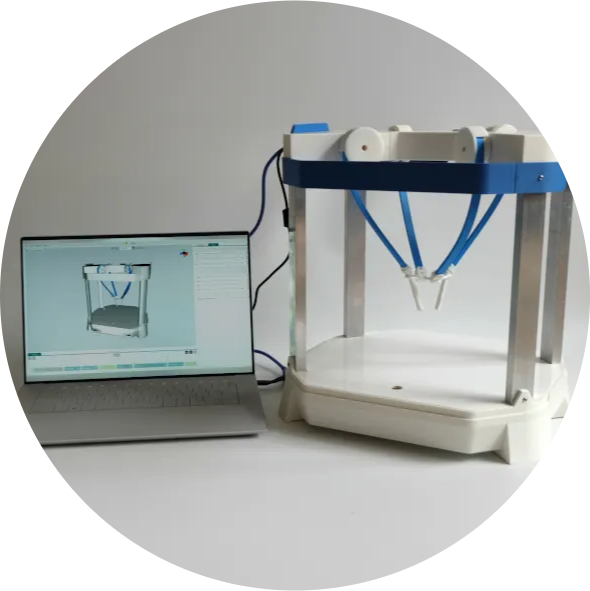
Teach soft robotics with the original content created by Compliance Robotics (distributed with Emio Labs). It provides a practical introduction to the concepts of soft robotics: models, inverse kinematics, pick & place, design, and closed loop.
Explore our GitHub repositories to access a comprehensive collection of labs and demos designed for Emio and the Emio Labs application.
In this page you will find a selection of labs and projects. Each lab is described with its recommended audience, and a short description. We are continuously working on new labs, projects and demos, so don't hesitate to check back regularly for updates or subscribe to our newsletter.
Easily compose your labs and add your own content. Share your content for Emio with the community. Contact us to add your content to this page by sending an email at this address contact@compliance-robotics.com.
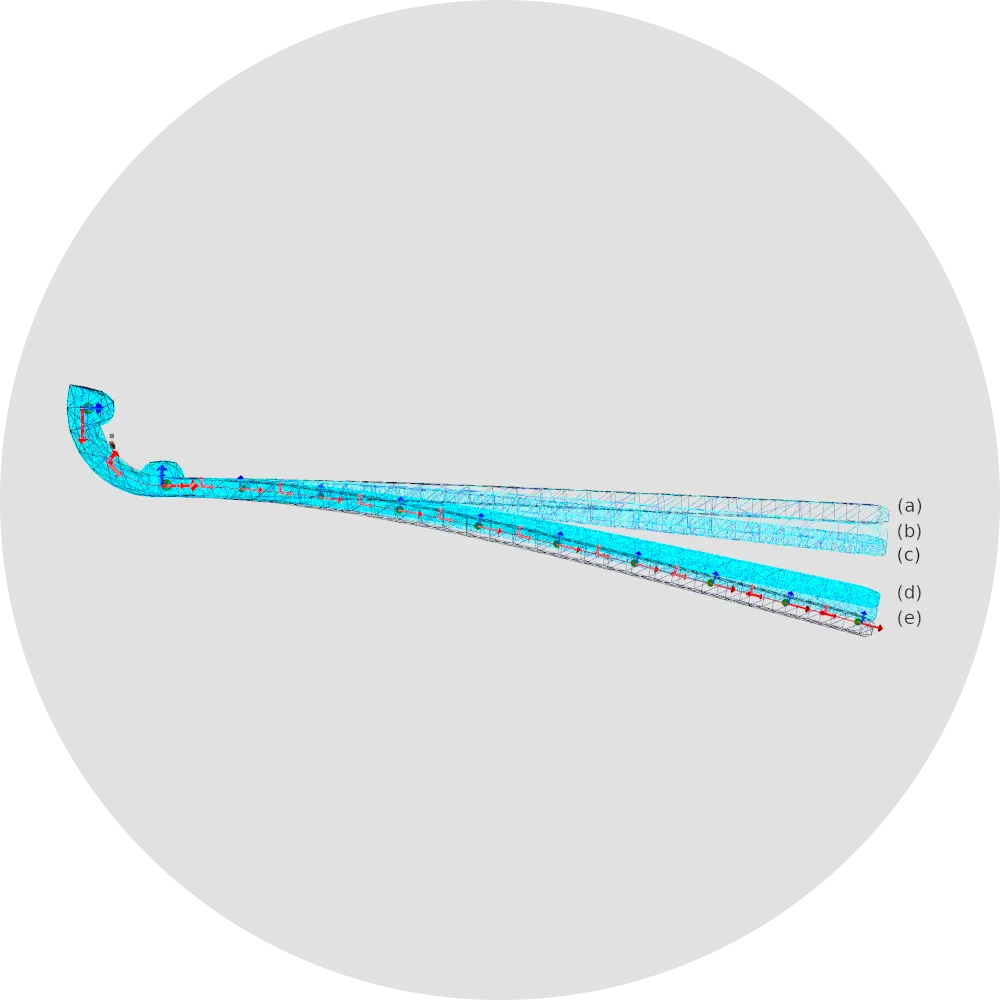
Lab - Models for Soft Robotics
Author: Compliance Robotics
Recommended audience: Master's or PhD students in robotics, mechanical engineering, or related fields.
Distributed with the Emio Labs application
Discover and analyse different models. Discover the accuracy and limitation of continuum mechanics models.
🚀 Lab - Inverse Kinematics
Author: Compliance Robotics
Recommended audience: Master's or PhD students in robotics, mechanical engineering, or related fields with experience in Python programming.
🚀 This lab features content that does not require the robot. Distributed with the Emio Labs application.
Explore the principles of inverse kinematics as applied to soft robots, and write your own inverse kinematic solver in python.
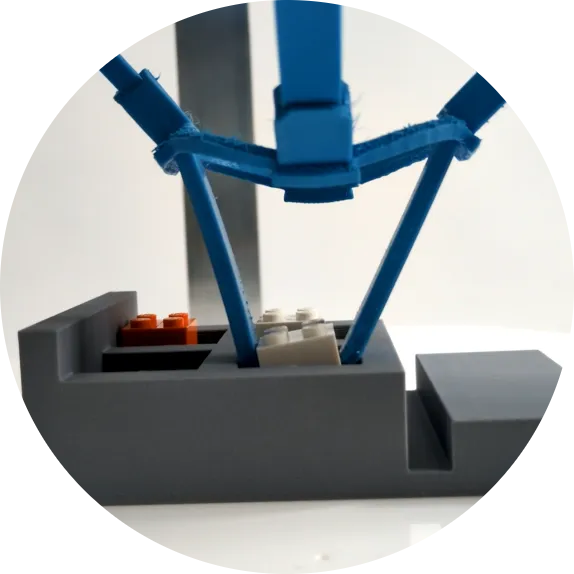
Project - Pick & Place
Author: Compliance Robotics
Recommended audience: Undergraduate students in robotics, mechanical engineering, or related fields.
Distributed with the Emio Labs application
Start from scratch, end up with a full deformable pick & place robot, and solve a pick and place task.
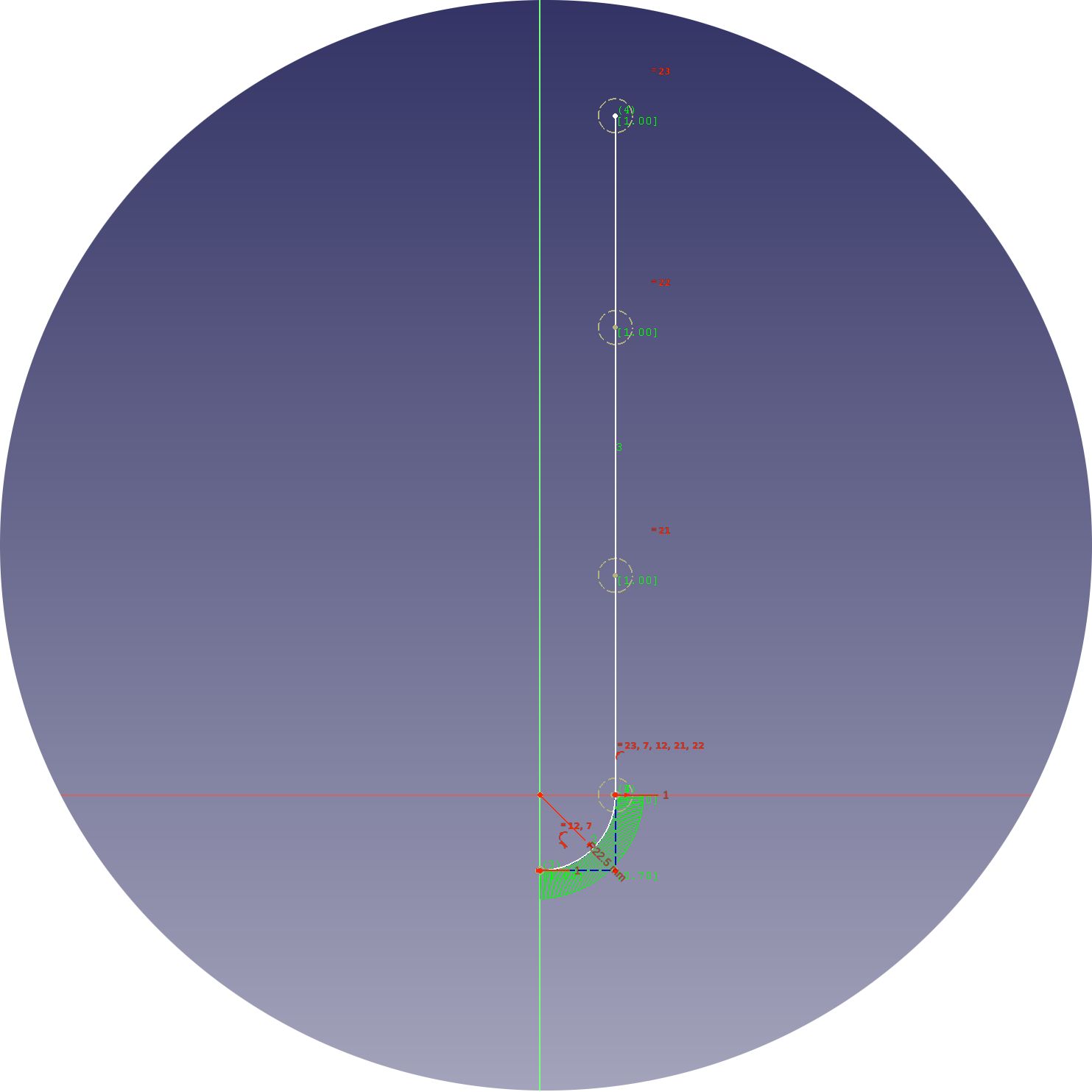
🚀 Lab - Design
Authors: Quentin Peyron & Compliance Robotics
Recommended audience: Undergraduate students in robotics, mechanical engineering, or related fields.
🚀 This lab features content that does not require the robot. Distributed with the Emio Labs application.

Design your own legs and gripper for Emio, and check their performance in simulation.
Lab - Closed Loop
Author: Compliance Robotics
Recommended audience: Master's or PhD students in robotics, control engineering, or related fields.
Distributed with the Emio Labs application
Discover closed loop control strategies, from basic inverse kinematic proportional control, to state feedback plus observer.
