Emio Labs
A Desktop Application With Interactive Labs
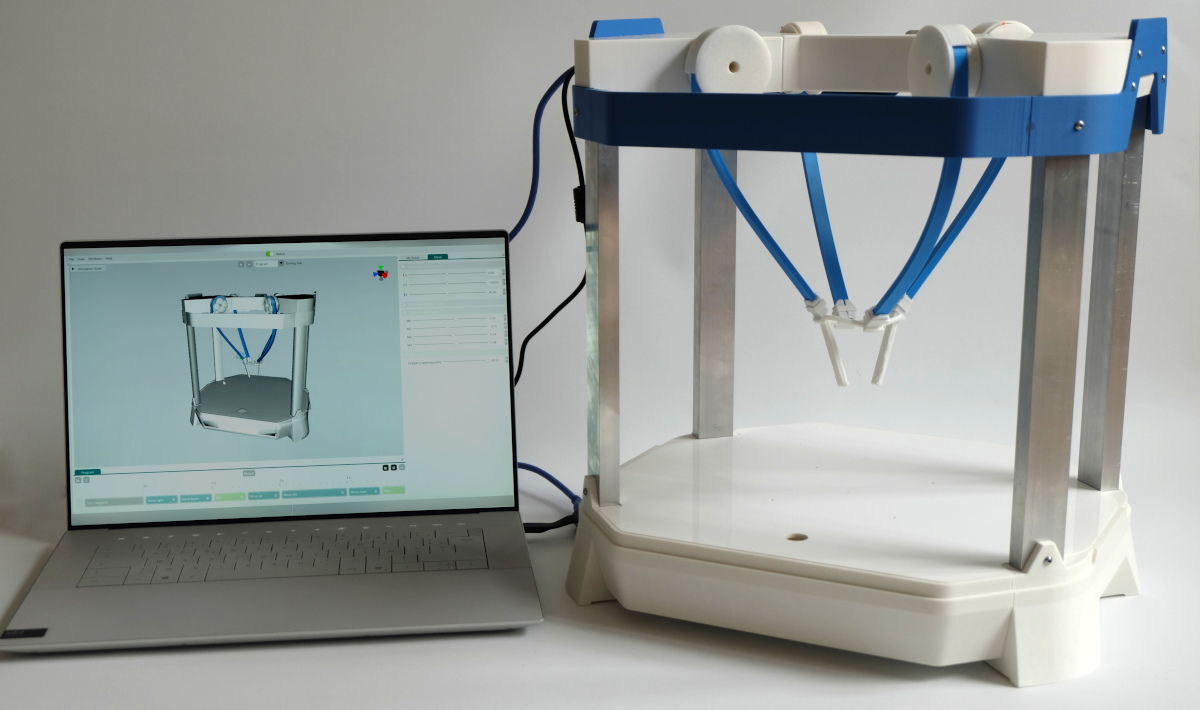
This application is designed to provide a hands-on learning experience for students and researchers interested in soft robotics. It includes a series of interactive labs that cover various aspects of soft robotics, including modeling, inverse kinematics, pick & place, design, and closed-loop control. It is built to be used with the Emio robot, a reconfigurable continuum parallel robot developed by Compliance Robotics.
📄️ App User Manual
Welcome to the user manual of the Emio Labs application.
📄️ Find a Lab
Teach soft robotics with the original content created by Compliance Robotics (distributed with Emio Labs). It provides a practical introduction to the concepts of soft robotics: models, inverse kinematics, pick & place, design, and closed loop.
📄️ MATLAB
Pilot Emio from MATLAB, and create your own teaching material. Thanks to the UDP bridge of the Emio API and the MATLAB.Emio GitHub repository you can use the Emio Communication UDP block in SimuLink and send commands to Emio, and also retrieve markers position, directly from MATLAB.
📄️ Create Your Own Lab
Learn how to create your own labs for the Emio Labs application.